|
 |

|
At long last, the robot is fully constructed and assembled. With the panel box installed, it is considerably larger than just the chassis, as one can see in this image with some scale.
|
|

|
With the top panel and support mast in place, all but one side panel is missing from the completed robot. Again, one can see a tremendous amount of cargo/payload space between the chassis and panel box.
|
|

|
As one can see from this image, there is a tremendous amount of unused space between the chassis and the panel box. This could be used as payload space. In the future, it may be necessary to lightly seal this space from the outside world, lest it completely will with spindrift and weigh the robot down.
|
|

|
The chassis lid both seals the chassis from the outside world and provides it with greatly increased torsional stiffness. It has 8-32 mounting holes on a 5" grid, much like an optical table. It also has a small plate of mild stainless steel, to which the GPS antenna can attach magnetically. The hole in the center accepts the mast, through which pass a number of cables, and supports the center of the top panel.
|
|

|
It would take too long to detail all the electronics contained within the chassis, but here they are. What is worth noting is that, aside from the batteries, the electronics occupy only one-half of the interior space, with the other half reserved for payload, such as the datalogger in the bottom right. There are also a number of cables that must pass through the chassis lid and mast to the outside world.
|
|

|
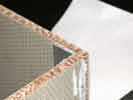
For a high-strength corner, the honeycomb panel needs to be folded, so that the outside skin remains intact. This is preferable to joining several separate pieces together. In order to perform the fold, a specific width of the skin face needs to be removed (using a table saw), so that the honeycomb matrix can collapse. Here, two walls will be folded up in a single corner.
|
|

|
With the walls folded up, the resulting corner has two rounded edges, and one butted edge where the walls come together. This is a considerably stronger and more sure construction technique than starting with three discrete pieces and butting them together, as the fiberglass skin remains mostly intact.
|
|

|
Demonstration of the folded corner construction used with the honeycomb structural panel material.
|
|
|
Demonstration of a butted joint where two folded-up walls come together, reinforced with angle-aluminum and epoxy on the inside. The whole chassis was constructed in this fashion.
|
|

|
The wheels are bolted to these hubs, which are welded to driveshafts that extend into the robot. The weight of the robot is carried out to the wheels by larger support tubes, which pass through the chassis walls and have a roller bearing at the distal end through which the drive shaft passes.
|
|

|
You can see here two of the drive shaft assemblies, with their support tubes and driveshafts, extending from the sidewall of the chassis. Also visible is an outrigger that provides an attachment point for the solar panel box.
|
|

|
The wheels were designed and machined to fit a standard 16" diameter by 8" width ATV tire. The wheels also fit a 20" tire from the same manufacture, which affords an addition 2" of ground clearance. The wheels have an operating pressure of just 3 psi. With the low weight of the robot, they even run flat.
|
|

|
After adding the valve, sealing the joint between the two halves, bolting the two halves together, the tire needs to be inflated to a relatively high pressure (25 psi) to properly seat the bead on the wheel. After that, it is good to go. The assembly can hold the 3 psi operating pressure without an innertube, which saved several pounds from the final construction.
|
|

|
The same wheels, but now with 20" tires mounted on them. Due to the additional ground clearance they afford, for a relatively small increase in the overall weight and power consumption of the vehicle, the robot has been completely switched over to these larger tires. Notice that the tread pattern has changed as well, from a nobby turf tire to a more aggressive chevron style.
|
|

|
Even if we lose a seal and get a flat tire somewhere, however, the tires are rigid enough to be run while flat. This is due to the tremendous difference between supporting an ATV, and supporting our robot. Here, Toni demonstrates the run flat capability (and chassis strength!) by sitting on the robot with flat tires.
|
|

|
Some quick work with 1/4-20 bolts, and the wheels are mounted to the robot. There is enough clearance for the outrigger to go between the tires (even when caked with some snow), and for the panel box to sit outboard of them.
|
|

|
Here is a side view of the finished chassis, with its wheels mounted to it. There is about 8" of ground clearance for the chassis bottom. In the future, a skid-plate of high molecular weight polyethylene may be added to the chassis bottom.
|
|
|
