
| |<< |< July 29, 2005 >| >>| | |
|
Jim and I made an executive decision to switch the robot over to our backup battery pack this morning. At the end of the day yesterday, we managed to deep discharge one half of one of our lithium-ion batteries, and it has been touch-and-go since then. We could still drive with the 2-1/2 healthy batteries, but we don't want to risk it until I get the solar power system online in a few days. The backups are a bunch of NiMH cells, much like an RC car battery pack, only much larger. Unfortunately, the backup batteries, while providing a similar bus voltage and current sourcing capability, total only about 1/3 the capacity of the lithium-ion stack. This effectively cuts our driving time on a single charge down to an hour or two. But, it is well that we have them - they are far more easily replaced if anything else goes wrong in the next week and a half. That task, and a handful of other new wirings, took a surprisingly large portion of the morning. I had to jury-rig a set of connector harnesses to tie these new batteries to the robot's power system. Meanwhile, Jim took a testing apparatus he'd brought with him from CRREL for measuring the strength and cohesion of the snow around here. This sort of data will be important in correlating sinkage, snow strength, traction, and rolling resistance. We found out this morning that two of our three sinkage sensors (basically, very good ultrasonic rangefinders) have called it quits. It is quite perplexing, since they were working (alberit intermittently) yesterday. We should still be able to get good data from the one we have left (which incidentally is the oldest one of the lot). The big task of the day was to give the robot a front end alignment. During our testing over the last few days (and even back in Hanover) we noticed that the robot has a tendency to curve off to the right when driving. The data we're taking from our mobility testing is most accurate if we have long, straight runs that we can average over. But, with the robot veering off to the right, we would have to give it little corrections to keep it on course. The listing would also be a problem for the navigation system - a disturbance it would have to reject. So, we went through the rather tedious task of tweaking the motor controllers so that all four motors had zero offset and equal gains. This is actually more difficult than it sounds, and took us most of the afternoon. But, at the end of it, we found that the robot drove significantly straighter. There are still some other factors that eventually cause it to drift - like unequal tire sizes, that we'll have to take a look at tomorrow. The food continues to be stellar. The weather continues to be mostly gloomy. We had another flight today, which will be the last flight for this go 'round. The next time the planes come, around August 11, it'll be time for us to leave. There's still a tremendous amount that needs to be done between now and then! --Alex Streeter |
|
 |
|
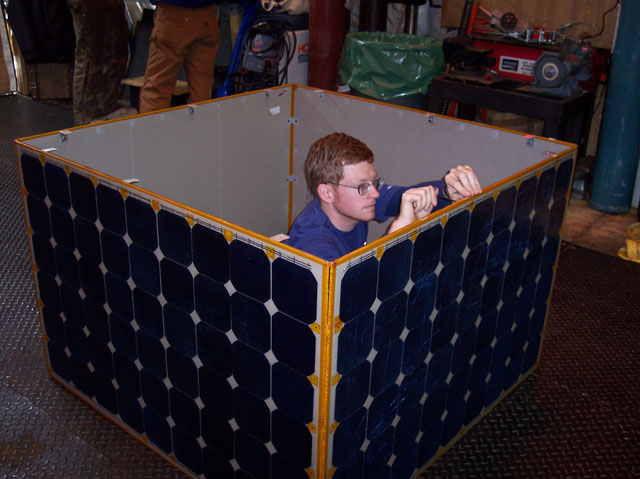
| This ain't no playpen, but the solar panel box being assembled after its long journey. |
|
| |<< |< July 29, 2005 >| >>| |
| [Main] | [Mission] | [Design] | [Science] | [Papers] | [Pictures] | [Team] |
|
Last Updated on 10/20/2005 by Streeter
Site © Thayer School of Engineering, Dartmouth College, Hanover, N.H. |