
| |<< |< July 30, 2005 >| >>| | |
|
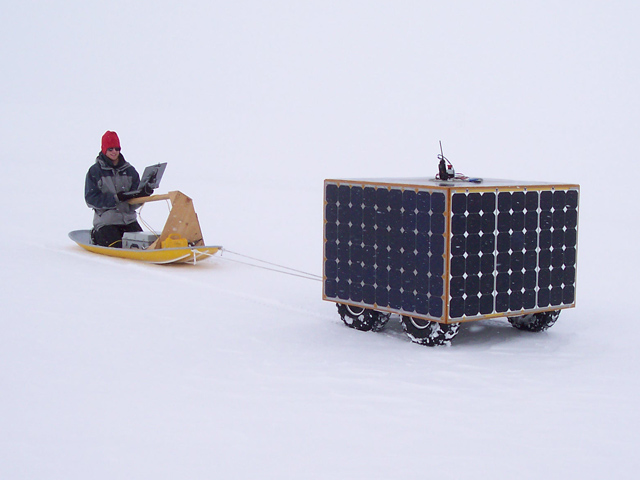
Overnight, new weather came in. By morning, there was a steady 5-10 knot wind, and light powdery snow in the air. Harbinger of a passing front? Maybe. By the end of the day, the clouds had parted and the sun, at long last, was able to shine fully. After days of flat lighting under overcast skies, which made it impossible to distinguish sky from snow, or discern surface features more than a few feet away, we could see distinct shadows, casting everything in sharp relief. The sun glinted off the many facets of the the fresh powder, several inches of it. But, during the morning's testing out with the robot, the wind was still blowing a fine spindrift about. It would quickly cover over the robot's track - sometimes in a matter of minutes. We spent some time this morning taking measurements of the robot's ground contact patch - an essential piece of information for determining the ground pressure of the device, and its traction. Our design specification was for the robot's ground pressure to be < 20 kPa, which is about half the ground pressure that you or I exert on the ground in our boots. Our measurements indicate that the ground pressure of the 65 kg robot is about 16 kPa. Add in some 15 kg of payload, and the ground pressure will be almost a spot on match with our design spec. We spent some time this morning with the robot out on the runway, and out in the more open areas that had deeper snow. In order to make some more quantitative measurements of the snow's strength and cohesion, we brought out a testing apparatus that is similar to a tensile tester (though for compression, not tension). But, who wants to carry such things, so we placed it on a sled. But hey, why drag a sled, when we have a robot that drives around. Even better, why bother walking, when you can hitch a ride on the sled, too. We were pleased to find that the robot was quite capable of dragging a load greater than its own weight. I guess you could say that this robot pulls its own weight around here. The afternoon was spent largely attempting to get the GPS navigation system up and running. Goetz and Toni did excellent work on this. Our one test late in the day was a partial success - until one thing led to another, and the robot sort of lost track of what it was doing. This has happened from time to time, and it was not entirely the robot's fault. Part of the problem, I believe, lies in the fact that the robot expects waypoints on an Antarctic scale - tens or hundreds of kilometers apart. More work tomorrow should bear it out. --Alex Streeter |
|
 |
|
| How good of us to build a robot that does more than doesn't just sit there, but can pull its own weight. |
|
| |<< |< July 30, 2005 >| >>| |
| [Main] | [Mission] | [Design] | [Science] | [Papers] | [Pictures] | [Team] |
|
Last Updated on 10/20/2005 by Streeter
Site © Thayer School of Engineering, Dartmouth College, Hanover, N.H. |