
|
7/25/2005 A 4:15 wakeup call may work well for benjamin franklin (healthy, wealthy, and wise) but honestly, he was off his rocker on this one. We arrived at Stratton AFB near Schenectady, NY and offloaded our luggage. It was, I suppose, a typical part of the miliary: hurry-up (you must arrive by 5:15!) and then wait (briefing and loading will begin around 7, wheels-up at 8). We were hardly the only ones going - there were a total of three LC-130 planes that left the tarmac this moring, bound for kangerlussuaq. Not all of them were full of mad scientists and engineers seeking the ends of the earth: I suspect that at least one of them was flight crew and cargo only. I gather that, during the week that they are on station here in kangerlussuaq, the Air National Guard make quite a number of trips around the island: to a few other science stations, twice to Summit, and so on. It is getting late in the season, so it is also time for many of the folks that have already been here for a few weeks or months to pack it up and head home. For instance, while there are some 50 people at Summit station right now, there will only be about 20 by week's end. Traveling in an LC-130 must be a task originally intended to wear down the resistance of captured enemy combatants or something. Three large pallets of gear, strapped in place by a number of cargo nets, occupied the rear 2/3 of the plane. Seating in the forward 1/3 of the aircraft consists of seats intended to be easily removed and reconfigured. Hence, they are benches made of tubular aluminum and yet more cargo netting. Comfort aside, certainly the hardest part of the whole trip is the noise. Little plugs of foam are quite useless against the fact that the entire interior of the plane vibrates. Not just a simple humming or buzzing, but a vibration so pronounced that it telegraphs through the deck plates, through the soles of your shoes, tickles the souls of your feet, propogates through your tibia, and so on. Before long, you can feel the vibration permating every atom in your being. The cargo netting that you rest your back against likewise quivers beneath you. This is one factor that makes sleep (at least for me) impossible - if you allow your ear to contact any surface inside the plane, the noise will be conducted straight into your skull, bypass the ear canal and cochlea, and shake your brain like a bowlful of jello. Anyway, after some 7 hours of travel time, we touch down in Kangerlussuaq. It is a fair-sized town, by Greenlandic standards, that is dominated by an airfield that was built and once belonged to the US when we feared imminent attack from the soviets streaming from iceland, or something. Now it is a fairly large airport facility (still capable of accepting a B-52 in a blizzard!) that serves as a sort of port-of-entry for the whole island. The landscape is really quite different than my expectation. The weather was, quite atypically, gorgeous: about 65 and very sunny. A wonderful afternoon for strolling about. On all sides are ridges, promontories, and deeply cleft hillsides that mark the passage of glaciers so long ago. The rock still bears marks of a torturous existence. The hillsides are covered by a combination of grasses and shrubs that must have been specially designed and placed here by some higher power, if they are able to scape a living clinging to the rock and morraine. Note to all greenlandic travelers: whatever you might think to bring or will want during your trip, bring it yourself. Even assuming that you can locate some object that you forgot, intentionally left behind, or figured to obtain when you get there, the sheer resource that goes into getting it there to you increases the price substantially. Consider a $2.50 candy bar, or a $5 beer. No wonder the air crews were loading up cases of labatt blue and coolers by the pallet-full this morning. Here I must sign off - it has been a long day or difficult travel. We'll be up at 6 tomorrow (which, due to the 2 hour time difference, is actually 4 EST - no rest for the weary) for our 8 am flight to Summit, where we shall spend the next two weeks. --Alex Streeter |
|
 |
|
| The dorms in Kangerlussuaq may look a bit like ice-cube trays, but the accomodations inside are very homely. |
|
 |
|
| Even at 10pm local time, the sky is alight and the sun shines golden on the hills that surround the town for miles. |
|
|
7/26/2005 Go to sleep and it's perfectly light out - wake up and it's just the same. And this was at 5:45! It was a small crowd that boarded the LC-130 this morning - just six of us heading onto the Ice today. Jim, myself, two gents going up to fix/replace a UV sensor or something, and two employees heading up to work. One of them, Kathy, will be the station manager from now until November. After the camp officially ends the season in a few weeks, the staff will be reduced down to a skeleton crew of just 4: the station manager, a mechanic, and two science techs to keep the experiments running over the winter. In mid-November, the next crew of four arrives and, after a week of turnover, assumes the duties of managing Summit during the long dark until mid-February, when the next crew arrives. The trip from Kangerlussuaq initially took us up the coast. On one side of the airplane was a rugged and hilly landscape, covered in scarce vegetation in shades of green and brown, dotted with many lakes of meltwater that are trapped in deep stone basins in the hills. On the other side of the plane, one could see the fringes of the icecap - a blanket of white, striated and cracked into a million segments as it melts around the coast. A little further in, and one could discern pools of meltwater and meandering streams connecting them, which had melted through the white crust of the glacier to reveal its turquoise underbelly. Before too long the surface of the ice had turned a flat white; flat and white as far as the eye could see. Summit itself, as a camp, consists of a hanful of buildings, a small tent city, the 15,000 foot runway (skiway, they call it), various storage areas and depots, and huge expanses of snow on all sides. This is not quite as glum and austere as it sounds - some of the coolest things are happening in these buildings, and people are scrambling over one another to get to this snow. Folks here are using the whole of the island (or, at least, the couple of kilometers around (and below) Summit station) as one big laboratory for studying the atmosphere, climate, and chemistry past and present. There are also folks like Jim and myself, who find Greenland and wonderfully extreme environment that is similar to other extreme environments, like Antarctica or Mars. There are some other interesting, non-science or engineering, activities going on here - particular the raising. It snows here quite a bit over the course of a year, and the ice beneath slowly sinks and spreads out towards the coast. So, while the actual elevation may not change much, anything that was once on the surface will eventually be buried. This includes all of the buildings that make up Summit station. So, every few years they need to be relocated to higher ground. Some of the lab facilities and bunk spaces were dragged earlier this season onto a berm of snow raised a bit above the surrounding snow. The main building, called the Big House, which contains that kitchen, social spaces, satellite connection, etc., is actually being raised in place. This has been long overdue - all the pictures of Summit that I could find showed the Big House as just a white sphere half-buried in the snow. In reality, the sphere is the satellite dish enclosure, and resides firmly on the roof of the actual building, which has progressively sunk to the point where the ceiling was several feet below the surrounding snow. The task for the construction crew this summer is to raise it in place so that it is 15-20 feet above the ground. They are doing this by gradually jacking it up a scaffold - a few feet a day. They are about halfway there, and the Big House has a nice view out the window for the first time in years. Speaking of satellite, it is through this connection, which beams out into space, then down to Florida, and then on to the Internet at large, that I am able to provide these updates and field reports to our website. What an amazing world we live in, eh? After traveling some 2500 miles in a number of shipping crates, the Cool Robot once again saw the light of day. Well, almost - it has yet to leave the workshop/garage where we'll be tinkering with it and coaxing it into life for the next day or two. If all goes well, the robot will spend very little time in that garage after those first few days. If we end up spending a lot of time in the workshop, it will mean that something isn't working, and we won't be out and about taking data. Our stopping point for the day, since it was getting on into the evening, was powering up the robot for the first time in a few weeks. Thankfully, nothing exploded, shorted, smoked, burned, or in any other way broke down. Tomorrow, I shall endeavor to get the robot not only powered up, but also driving around. I am fairly confident that this task will only take a couple of hours, but I've said that enough times and been proven wrong that really I should know better. We've only got two weeks to do whatever we can get done. --Alex Streeter |
|
 |
 |
| The Big House is being raised from its previous sunken level, so that it stands well above the rising snow. Twelve feet down, twenty to go! |
We have set up in one corner of the workshop/garage, where they keep the snowcat and all their tools. The best part is that it's heated. |
|
7/27/2005 What with the fog that rolled in yesterday and has been broken only now and again for less than half an hour, the whole world outside the landmarks of camp is bathed in a monotonous sea of white. There are times when the horizon and sky blend seemlessly together, and even the features in the snow before your feet seem obscured. The folks that have been here a while - researches, and particularly the camp staff - all have a sort of reverse raccoon complextion. Their faces, exposed to the blowing cold wind, low humidity, and intense sunlight have been tanned (ie, like leather) to a deep brown. All of their face, that is, except where their shades rest. It's rather amusing to see people with a pronounced sunglass tan. After a quick breakfast at 7:45, it was off to the office, as it were. Imagine trying to do delicate proking around in a rat's nest of wires, or typing out trickly lines of code, when the ambient temperature is hovering around freezing! I'll not bore you with a lot of details about the work that we did today, other than to say that at the start of the day and the end of the day, the robot was driving around nicely under radio control. When this is going on, my left arm develops a horrible crick in the elbow and wrist from cradling a laptop, packet modem, and handheld radio while typing away with my right hand. My right hand, because it has to be able to hit keys accurately, needs to be stripped down to just a glove-liner. All in all, it is a lot trickier to do this work around here than in hanover in july. Of course, this was to be expected. We had very interesting snow conditions for our driving around today. Where the bulldozer or other big vehicle had passed, we had nice hardpack, punctuated with small ridges and obstacles from where a plow may have passed. On top of this crust lies several inches of powdery snow, which is somewhat atypical of Antarctic conditions and presents and interesting traction and mobility problem for the robot. But, from what we saw today, it appears to be up to the task. Since it is only our second day here, and these things take time, we only had the chassis running around on battery power - no solar just yet. We may get to the point of mounting the solar panel box on the robot tomorrow - but probably only so that we can get the weight of the robot right for taking some data. Actually powering the robot from the panels will take a little longer. There were supposed to be a flight today to take folks and gear back to Kangerlussuaq - it is approaching the end of the season. However, the fog ruled that out. As the LC-130 made several passes over the runway, one could hear that is was only a few hundred feet off, but could not even see it. Imagine not being able to spot something as large as an LC-130! So, they will have to double- or triple-up on the flights tomorrow. The hours have passed surprisingly quickly here today, especially this afternoon as I tried to debug and diagnose our latest problem. Mealtimes are without question the best times. Although there are usually 40-50 people crammed into the big house at once during lunch and dinner, it is still possible to have a nice conversation with just the handful of people at your table. It almost surprises me how interested most folks are in the robot. Tomorrow, we will focus on assembling the solar panel box, starting to get some quantitative mobility data, and whatever might cross our paths. --Alex Streeter |
|
 |
|
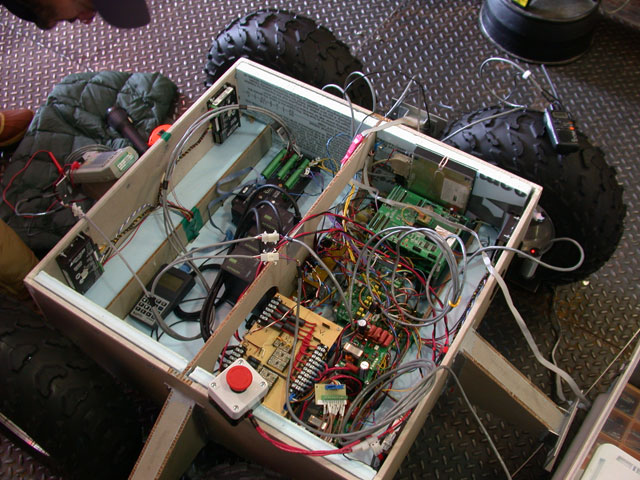
| The rat's nest continues to grow. There are still bits missing - such as all of the cables that bring in the solar power. In truth, it will be quite a task to get all of these wires to the outside, and up through the mast. |
|
|
7/28/2005 Things were up and down today again. Mostly up. We put the rest of the robot together - primarily the panel box, so that the robot will be driving around it's full weight. We had to bore a sizeable hole into the roof of the chassis to accomodate a bunch of wires that don't need to be threaded all the way up the mast to the top of the panel. Things like the wires that connect the solar panels to the power system. After lunch we took it for a spin. The snow conditions were, if anything, more difficult than anything we would encounter in Antarctica. There was, like yesterday, a hard crust beneath 3-4 inches of powdery snow. Jim and I would break through that crust and sink a few more inches; the robot just rode over it. That is not to say that it drove easily, a lot of the time it had to pull some serious power, and chewed up the snow beneath it in order to make headway. But, aside from one occassion where we tried to drive it up a large and steep embankment, it was able to handle everything we threw at it. The radio communications, which I tinkered with some yesterday, were behaving themselves a bit better today, but not perfectly. Flush with that success, we took the robot over to the skiway - the long flat runway of packed and groomed snow that the airplanes land on. We went out about few hundred meters, perhaps a kilometer, then headed back. The going was, naturally, much easier. Just to put things into a bit of perspective - while we required upwards of 200 W of power to operate in the powder, our power needs were only about half that on the hardpack runway. The preliminary results suggest that our rolling resistance on hardpack is about 0.09, while the powdery snow was closer to 0.24. Not only are these results encouraging in terms of our ultimate energy requirements in Antarctica, but they are almost a spot on match with our design assumptions (read: educated guesses) at the start of the project. There were two flights today, which has removed much cargo and many people, such that we now number 22 at Summit, instead of the 50+ we were this morning. The place is eerily quiet and empty as a result. It's kind a nice, actually, for it to be quiet around here. Jim and I have made a number of contacts among the people who just left, and those who are still here. Not necessarily future collaborators; at least, not yet. But, a number of people who think this is pretty neat. Since we have set up shop in the garage, we've had a lot of interested visitors and onlookers. And, whenever we have the robot out driving around, people always notice. I can hardly blame them - it really is a sight. [no pictures of the robot driving around today - I was too busy doing the driving to take any, and I haven't gotten what's on Jim's camera yet] We also said goodbye this morning to two Swedes who had been camping here for the past few days. I may have mentioned them: they are attempting a south-to-north traverse of Greenland. They've done east to west, and west to east, already before. They've encountered difficult conditions thus far, and it's taken them nearly twice as long as planned to cover the 1300 km from the southern tip to Summit. As a result, they'll have to cut their trip a little short, and aim for the NW coast instead of the very northern point. They've got about 500 km to go, downhill now that they've passed Summit, and plan on taking some 3-4 weeks to do it. Lots of luck to them! --Alex Streeter |
|
 |
 |
| The panels have survived their journey of 2500 miles intact and ready for action. |
Only 500 km of flat white left to go. Good luck! |
|
7/29/2005 Jim and I made an executive decision to switch the robot over to our backup battery pack this morning. At the end of the day yesterday, we managed to deep discharge one half of one of our lithium-ion batteries, and it has been touch-and-go since then. We could still drive with the 2-1/2 healthy batteries, but we don't want to risk it until I get the solar power system online in a few days. The backups are a bunch of NiMH cells, much like an RC car battery pack, only much larger. Unfortunately, the backup batteries, while providing a similar bus voltage and current sourcing capability, total only about 1/3 the capacity of the lithium-ion stack. This effectively cuts our driving time on a single charge down to an hour or two. But, it is well that we have them - they are far more easily replaced if anything else goes wrong in the next week and a half. That task, and a handful of other new wirings, took a surprisingly large portion of the morning. I had to jury-rig a set of connector harnesses to tie these new batteries to the robot's power system. Meanwhile, Jim took a testing apparatus he'd brought with him from CRREL for measuring the strength and cohesion of the snow around here. This sort of data will be important in correlating sinkage, snow strength, traction, and rolling resistance. We found out this morning that two of our three sinkage sensors (basically, very good ultrasonic rangefinders) have called it quits. It is quite perplexing, since they were working (alberit intermittently) yesterday. We should still be able to get good data from the one we have left (which incidentally is the oldest one of the lot). The big task of the day was to give the robot a front end alignment. During our testing over the last few days (and even back in Hanover) we noticed that the robot has a tendency to curve off to the right when driving. The data we're taking from our mobility testing is most accurate if we have long, straight runs that we can average over. But, with the robot veering off to the right, we would have to give it little corrections to keep it on course. The listing would also be a problem for the navigation system - a disturbance it would have to reject. So, we went through the rather tedious task of tweaking the motor controllers so that all four motors had zero offset and equal gains. This is actually more difficult than it sounds, and took us most of the afternoon. But, at the end of it, we found that the robot drove significantly straighter. There are still some other factors that eventually cause it to drift - like unequal tire sizes, that we'll have to take a look at tomorrow. The food continues to be stellar. The weather continues to be mostly gloomy. We had another flight today, which will be the last flight for this go 'round. The next time the planes come, around August 11, it'll be time for us to leave. There's still a tremendous amount that needs to be done between now and then! --Alex Streeter |
|
 |
|
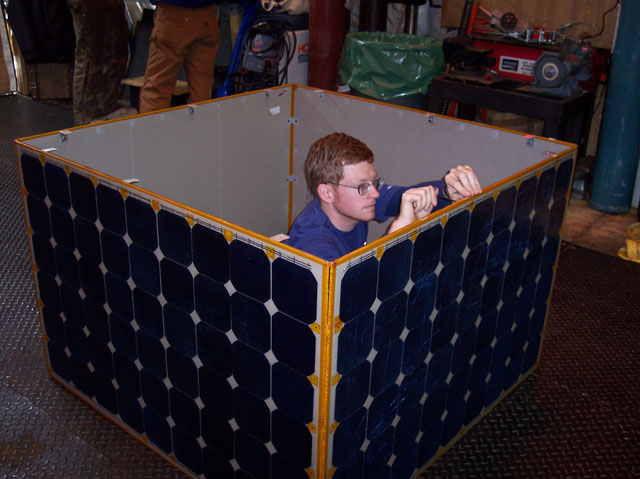
| This ain't no playpen, but the solar panel box being assembled after its long journey. |
|
|
7/30/2005 Overnight, new weather came in. By morning, there was a steady 5-10 knot wind, and light powdery snow in the air. Harbinger of a passing front? Maybe. By the end of the day, the clouds had parted and the sun, at long last, was able to shine fully. After days of flat lighting under overcast skies, which made it impossible to distinguish sky from snow, or discern surface features more than a few feet away, we could see distinct shadows, casting everything in sharp relief. The sun glinted off the many facets of the the fresh powder, several inches of it. But, during the morning's testing out with the robot, the wind was still blowing a fine spindrift about. It would quickly cover over the robot's track - sometimes in a matter of minutes. We spent some time this morning taking measurements of the robot's ground contact patch - an essential piece of information for determining the ground pressure of the device, and its traction. Our design specification was for the robot's ground pressure to be < 20 kPa, which is about half the ground pressure that you or I exert on the ground in our boots. Our measurements indicate that the ground pressure of the 65 kg robot is about 16 kPa. Add in some 15 kg of payload, and the ground pressure will be almost a spot on match with our design spec. We spent some time this morning with the robot out on the runway, and out in the more open areas that had deeper snow. In order to make some more quantitative measurements of the snow's strength and cohesion, we brought out a testing apparatus that is similar to a tensile tester (though for compression, not tension). But, who wants to carry such things, so we placed it on a sled. But hey, why drag a sled, when we have a robot that drives around. Even better, why bother walking, when you can hitch a ride on the sled, too. We were pleased to find that the robot was quite capable of dragging a load greater than its own weight. I guess you could say that this robot pulls its own weight around here. The afternoon was spent largely attempting to get the GPS navigation system up and running. Goetz and Toni did excellent work on this. Our one test late in the day was a partial success - until one thing led to another, and the robot sort of lost track of what it was doing. This has happened from time to time, and it was not entirely the robot's fault. Part of the problem, I believe, lies in the fact that the robot expects waypoints on an Antarctic scale - tens or hundreds of kilometers apart. More work tomorrow should bear it out. --Alex Streeter |
|
 |
|
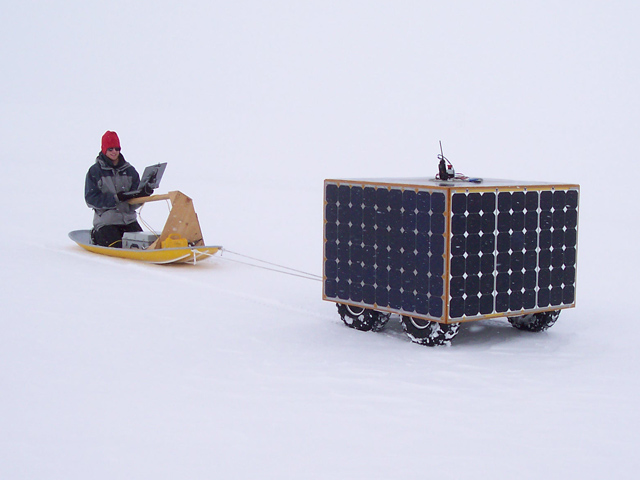
| How good of us to build a robot that does more than doesn't just sit there, but can pull its own weight. |
|
|
7/31/2005 All in all, not a bad day. Sundays are leisurely here at Summit. Many of the staff have the day off. For researchers, though, especially those here for a brief few weeks, it is business (nearly) as usual. Although we probably had every intension to get started on the day's work around 8, as we usually do, Jim and I had a laid back breakfast, enjoying the conversation with a few of the staffers here. As it was, we didn't get to the robot until nearly 10. I'd say that's a fine way to do things. Still, 10 a.m. put Jim and I in a minority of folks doing anything work related today. A number of folks, after lunch, took a quick trip to the old GRIP drill site - where one of the more publicized deep ice core samples was dug up a number of years ago. I spent the morning partly familiarizing myself with the code behind the GPS navigation system and, in one or two places, tweaking it a bit. This is a bit of the project that, unlike my solar power system, has been proven in full up tests in the past. Although we know that it works, a few changes elsewhere in the overall program forced me to reexamine it a bit. This took the rest of the morning and part of the afternoon. Jim, meanwhile, was quite patiently and meticulously pouring over the data that we'd gathered during the driving tests yesterday. These data, and data that we have gathered in the previous few days, indicate that the robot has a tremendously low internal drivetrain resistance, and a quite low rolling resistance, even over soft snow. It is a credit to the hard work of all the project members from these past two years. Eventually, we were able to take the robot out and see if it could find its way. We had tried this yesterday, with limited success. Our first time or two out we encountered the same result: the robot seemed to ignore the first waypoint given to it, and try to make directly for the second one instead. Also, while Jim and I managed to get the robot's motors balanced a few days ago, it still lists to the right when driving at 100% speed. We were able to overcome these problems with a little more code hacking, so that the robot was able to actually drive from some starting point, to point A, to point B, then stop and await further instructions. Tomorrow we will set it on a roundabout course on the LC-130's turnaround space, a trip of perhaps 2 km. All in all, not bad for a Sunday afternoon. --Alex Streeter |
|
|
8/1/2005 What a fine day. The sky, very late in the day, has finally opened up for a brief period to give us our first clear view of the sun in days. A stark comparison to this morning, when everything about us was bathed in a softening shroud of fog. Cloudy skies, white snow, and fog all about make for a rather surreal appearance. If we are lucky, however, we may be able to coax the sun into sticking around for a few days. This evening marks T-7 days for us. We were informed this morning that our flight back to Kangerlussuaq will be on the 10th, next Wednesday. What's more, we will promptly be turned around and put onto another flight the following morning, bound for New York, rather than on the 13th as scheduled. It is a bit of a dissappointment to me, since I was hoping to get a few days to hike in the hills around Kangerlussuaq. Finally, this flight back to the States will be a "cold cabin" flight, which means that it will be full of ice cores that need to be preserved at cold temperatures. So, we'll be huddled in sleeping bags for the whole ride back. But, getting back to the T-7 days bit - it means that we are about halfway through our time here. We've accomplished a fair bit, and today was perhaps our most successful thus far in terms of milestones. We started off the day by having the robot drive a course on its own. From the front door of the garage where we store and work on the robot, out past the fuel depot, and then following the loop used by the LC-130s to turn around, and out onto the runway. All in all, I estimate it was 2-3 km. The robot (under our close watch, naturally) flawlessly homed in on one waypoint after the next, transitioning between them easily, and making great headway. Having (re)proven the robot's ability to drive itself around using GPS, we turned our attention to the last (and perhaps largest) hurdle: the solar power system. [I say reproven, because Goetz and Toni managed to do the same task this past winter on Lake Mascoma]. The difficulty with this power system, as opposed to a residential system, is that it has a number of panels, all operating simultaneously and under different conditions of light and temperature. As the robot drives around, it will pitch and tilt over obstacles, which causes the insolation on each panel to change rapidly. We weren't going to try all of that at once, however, not yet. Instead, we focused on the more modest task today of extracting power from a single panel. With the robot up on a box and spinning its wheels to create a modest load, the power system controller managed (after some encouragement) to do just that. Bathed in weak diffuse light from a cloudly sky and lowering sun, the amount of available power wasn't tremendous, but enough for the job. It is a small milestone compared to the autonomous driving earlier today, but an encouraging result and harbinger of things yet to come. Now if only the sun will stick around... --Alex Streeter |
|
 |
|
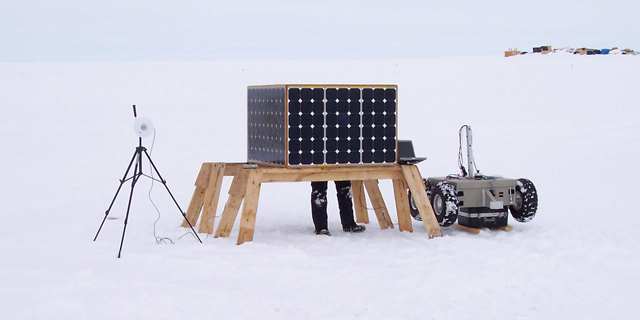
| Our setup for testing the solar power system today. The robot is on a box so that it can spin its wheels and create a moderate load, without actually going anywhere. The panel box is set off to one side, so that we still can access the electronics inside the chassis. The thing on the tripod that looks like a giant eye is actually a pyronometer used for measuring the intensity of sunlight. Today, due to the heavily cloudy skies, it wasn't measuring much. |
|
 |
|
| Horseshoes after dinner. |
|
|
8/2/2005 As one can see from the first of today's two pictures, the day started clear and beautiful. However, by the time we had had breakfast and set to work, the clouds had returned. The word on the wire is that there is some weather coming through, which might eventually clear away the overcast skies we have endured almost nonstop since our arrival a week ago now. At the very least, it has gotten colder - it was in the single digits (Fahrenheit) the whole morning, and a steady 10 knot wind was blowing from the NE. All in all, cold conditions for being outside. And to think, back home in Hanover they are posting temperatures in the mid 80's with lots of golden sunshine. It is a tricky thing to do any sort of testing outside when it is that cold. The clouds and snow create a surprisingly intense, but incredibly flat, lighting that requires sunglasses whenever you venture outside, and make it nearly impossible to read a laptop screen. Refer to the second of today's pictures. In addition, I often have to tap in commands, change code, start and stop the program, etc., which cannot be done in heavy gloves. Even thin glove liners result in numerous typos, and makes using the trackpad on the laptop nearly impossible. Yet, the work is there to be done, and when working on solar power, one really does have to be outside to effectively test it. There are some benefits to working with solar in these conditions, however. The colder temperatures keep the cells cooler, which results in higher efficiency. Secondly, the diffuse lighting created by the clouds and snow, which devilish for eyesight, provides all of the panels with nearly uniform insulation. All this information about solar power and being outside leads me to the big news of the day. Yesterday and this morning we focused our efforts on bringing one panel online to provide power to the robot. The control effort seeks to draw as much power from the solar panels as is needed for the rest of the robot. This is usually not the same thing as extracting all possible power from the solar panels. In the case of just a single panel in the half-light we have become accustomed to, there is not enough power available to satisfy the robot's full demand, unless the robot is stationary or driving at a very slow speed. However, with just two of the five panels online, as we achieved this afternoon, there was enough power to drive at a moderate speed without drawing supplemental power from the batteries. The jump from two panels to five is not as large as it might sound, so we are confident that we shall be able, by the end of this trip, to draw all our power from the sun and drive the robot continuously for hours and, ultimately, days on end. Now if only the sun will cooperate... --Alex Streeter |
|
 |
|
| Tent city under blue skies and crisp early morning sunshine. |
|
 |
|
| Later in the day, when Jim and I are actually doing work with the robot, the weather is a little less cooperative: overcast, cold, and with a steady wind. But, on the plus side, we've gotten to the point where the robot can drive itself (shown here), and draw some of its power from the solar panels (also shown here, although you can't see it). |
|
|
8/3/2005 Another fine and productive day here on the Ice. Our motivation to get out and moving was all the greater for the fact that, after 8 straight days of overcast skies, the clouds finally parted to reveal clear blue sky all around us. The Wind and light snow of the past few days made interesting patterns in the snow surface - some places lightly ruffled, others smooth and bare, all swirled together. With abundant sunshine, we made our way out onto the now familiar track where we have been testing the GPS navigation for the past couple of days. The insolation was high: some 1000-1200 W/m^2, considerably higher than one would usually see in Hanover, NH. What's more, the snow all around provided insolation even to those panels not actually in the light. Using the power from the two panels that we have online, we drove ahead at full speed with the GPS navigation algorithm. At times, when the front panel was in shadow, we did not quite have all the power we needed to drive without drawing from the batteries. Towards the end of the loop, some 2.5 autonomous kilometers later, the front panel was facing towards the sun, and we faced a 100 W surplus of power! By this point, drawing towards lunchtime, clouds ringed the horizon a full 360 degrees. During lunch, the blanket we have become accustomed to dew back over us from the east, blotting out the sun once again. It was a nice couple of hours - I wish I had taken some pictures while we were out. Thankfully, Jim had the presence of mind to bring his camera out with us, so we do in fact have some record that the sun did indeed shine today. We now have achieved a rather momentous milestone. Each of the preceeding days, when we tried either the GPS system or the solar power system, there was some small glitch that cropped up right at the very end. Today, we drove the robot out of the garage via radio control, ramped up the solar power system as it was sitting there, had it enter into its autonomous navigation mode, follow a course of about a half dozen waypoints (see picture below), draw nearly all of its power from the solar power system (when it was driving towards the sun), reach the end of the navigation and stop, reenter into manual driving control, and be the last few hundred meters back to the garage, again drawing its power from the sun. The afternoon was spent analyzing the data from the morning's run (Jim) and preparing to bring the remaining panels online (me). Unfortunately, a couple of burnt MOSFETs kept us from getting back out quickly. By the time we were ready, we realized that the batteries were drained from an afternoon's worth of bench testing (after two days of light duty, when they were augmented by the solar panels, we didn't bother to charge them overnight). So, that shut us down for the rest of the day. Just as well, perhaps, the clouds were as thick as ever, and there were was a decent amount of wind, and even some flakes in the air - not a great way to end the day. So, as we have encountered pretty much every day since our arrival, some ups and downs, but we ended the day further up than down. This is doubly true, as the raising of the Big House has pushed on ahead these past few days. We now can reach it only by ascending a 10' ladder. We shall see what tomorrow holds. --Alex Streeter |
|
 |
|
| Blue skies at last! |
|
|
8/4/2005 The morning started off well enough. We took the robot over to an area where the a Caterpillar D6 has been driving 8-10 hours a day, moving huge amounts of snow to back fill around and under the raising of the Big House. As a result, there were many hard ridges and trenches for us to drive the robot over. The steepness and height of these features was slightly more than what we can expect to see in Antarctica, but better too hard than too easy. The robot, although looking like it was about to tip over backwards, or do a face-plant here and there, was able to clamber up and over whatever we pointed it at. Check out the pictures down below. And, although it will surely take a good long while to upload, check out the movie clip as well. I apologize for the poor quality - it was taken with a digital camera, not with a proper video camcorder. There is one here at camp, so we will try that out some more tomorrow. Part of the our aim in driving around this morning was to see how the full-sized robot would handle the rough terrain, but also so that we could drain the batteries down from their full charge to something less, so that they could both give and accept energy. I am referring to the fact that we are still working on getting the whole solar power system up and running. Yesterday we succeeded in bringing two panels online, which was almost enough energy to drive in favorable conditions. We wanted at least a third panel. Yesterday we had some hardware problems, which plagued me all the rest of today. I am having some difficulty in conceiving where this latest problem is coming from - there are only so many possible sources, and I think I've eliminated all of them. Yet, there it is all the same - the several small broken parts that I keep having to replaced, without any ultimate success. Jim, meanwhile, was continuing his dogged task of analyzing the data that we are collecting, then going out and collecting more. This afternoon, under the overcast skies that have been our companion nearly our whole time here, Jim collected insolation data using our pyronometer. With this data, we can quantify the amount of sunlight incident on the five panels from various orthogonal orientations. With such cloudy conditions, the amount of sunlight is nearly uniform in all directions. However, if our panels continue to perform well at 18-20% efficiency, then it is easy to envision that we would be able to satisfy our full power budget with the five panels even in these overcast and gloomy conditions. This is an encouraging result, even if we are not currently able to take advantage of it at the moment. --Alex Streeter |
|
 |
 |
| The first of two brief movie clips that show the robot driving over some the terrain we set it to today. Unfortunately, the quality is limited, and the poor camera element was pretty well saturated in this shot. | The second clip, considerably better contrast and quality. |
 |
 |
| A still image from the morning's driving. | Testing with the pyronometer under overcast skies. |
|
8/5/2005 The day was a mixed bag, as many days since we got here have been. Trying to drain down the batteries a bit, we drove the robot around on the flat skiway turnaround using battery power. The robot was towing a sled, attached to which was a load cell. Using this setup, we wanted to gauge how much the robot could pull on that terrain with the these tires. As you saw on this website a few days back, the robot is quite capable of towing at least one person (me) on a sled. That was only the opening round for today. As we kept going, we added a second person, then a third. By the time the wheels finally started to lose traction and churn away the snow beneath, we were towing something like 450 lbs.! The other task for the day, as it has been for the previous day and a half, has been to get the solar power system past the first two panels we had working earlier this week. Each time we have tried, something has broken, necessitating several hours of painstaking diagnosis and repair. It would seem at this point that, as the power system crashed once again this afternoon, hardly before we even got started, that the root cause has still eluded us. Each time something has broken, I have come up with some theory or explanation why. Each time, I'm fairly sure that I've finally got it. Well, the current evidence suggests that I'm not quite there yet. But, I have a new theory... --Alex Streeter |
|
 |
|
| We should start selling tickets - the coolest ride on the whole island. Maybe not the fastest (ok, definitely not the fastest), but where else can you surf the snow with your own solar powered robot? | |
|
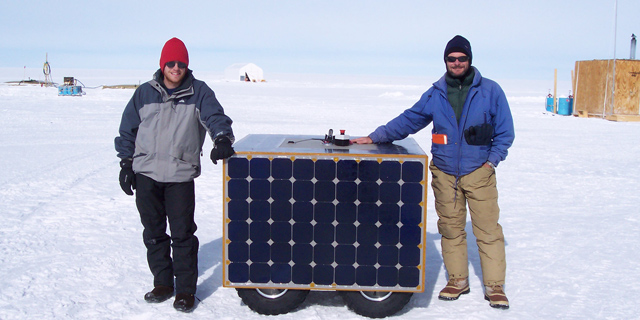
8/6/2005 Today is a late post, and for good reason. Today's theme is: the end of the season. According to the calendar, the equinoces and solstices mark the beginning and end of seasons. Around here, this near to the pole, other benchmarks are used. Case in point: when does the sun fall below the horizon, ending the continuous day that has graced this area for months. At the far southern reaches of the world, on Antarctica, winter-over crews are eagerly anticipating the rise of the sun above the horizon. Sunrise and Sunset. For us, Sunset occurred at just past midnight. Really, this post is happening on Sunday. Of course, once the sun has set below the horizon, it starts coming back up, so sunset and sunrise are one and the same at this moment. Alas, whereas an hour before Sunset the sun was out in the clear sky and casting a golden glow over everything, by the time it'd reached the horizon it had slipped behind a bank of clouds hugging the horizon. So, iin the end, no joy tonight. The subzero temperatures (fahrenheit) didn't encourage people to linger around. But, since tomorrow's Sunset will occur at basically the same time and night will last just a touch longer, perhaps we shall try again tomorrow. All of us are hoping to watch the sun slowly slant below the horizon, which is flat and straight as a ruler here, and maybe even see the elusive green flash. All in all, today was a good day. My theory proved to be correct, more or less. I didn't actually come up with a theory to explain the repeated power system failures we've encountered in the last three days. Instead, I vaguely identified the root cause, and then modified the hardware and software to completely avoid that cause. Thankfully, this course of action was successful - and we managed to bring a third panel online this afternoon with nary a mishap. The weather even cooperated - blue skies all about, and a powerful Sun pouring sunshine down on the robot's solar panels. In fact, during the hour or so that we sent the robot out on its now-familiar autonomous route, with only three panels activated and providing power, we managed to actually have a slight net increase in the battery voltage. In other words, the batteries not only didn't have to provide much power, but they actually were given a small amount of extra energy during the course of the route. We have managed to borrow and (more importantly, learned to operate) the station's digital camcorder. So, we now have a bit of higher-quality footage than we posted the other day. But, seeing as it is now past midnight, and we still have more work to do tomorrow, I'm afraid I haven't had time to put together decent video clip for your viewing pleasure. Instead, enjoy this picture, the first on this trip, actually, of both Jim and I and the robot in a single frame. --Alex Streeter |
|
 |
|
| At long last, a picture of the three of us. | |
|
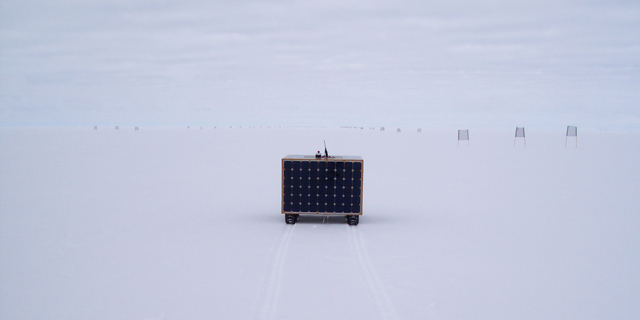
8/7/2005 It has been a looong day, but well worth it. It is true that it is sunday, and sundays are usually a bit more laid back than the usual work day. But, this was our last real full day to try and get some major testing done on the robot. So, after giving ourselves and extra half hour or so this morning to get going (which certainly wasn't enough, after staying up into the wee hours watching the non-sunset, then playing cards afterwards), we continued on. After one or two small hardware glitches (a measurement circuit with a bad solder joint here, a burnt opto-coupler there, the usual) we succeeded in getting a fourth panel online. We would have proceeded onto getting the fifth and final panel online and providing power, except that it is not possible. The numerous failures earlier this week, which took some three days to resolve, had drained our stock of replacement parts to the point that we not only have four working DC/DC converters for conditioning the power output of a solar panel. So, four it is, and four it shall be (until we can get back stateside and can make an order to Digikey). But, with the tremendous amount of sunlight available to us all day, four would certainly be enough, unless perhaps the sun got low on the horizon and we the robot had it dead astern. More on that later. Wanting to give the robot a real test, now that we could be assured of continuous power for hours on end, we sent it out on a long course: a series of waypoints to the north of camp, a round trip of some 12 kilometers. We sent it on its way around 3:30 or so, under blue skies and towing a sled of equipment behind it for measuring the amount of sunlight around and the strength of the snow beneath. Jim followed after it for the first long stretch, taking data as he did so, but leaving the robot to its own devices. From the word go, we neither gave the robot instruction nor received feedback from it. By the time Jim and I were switching roles (my turn to babysit and trail the robot), around 7pm, the robot had become a speck a good distance off. At the same time, the sun had already crept low on the horizon. Sunset occured yesterday, so we knew that the sun definitely would not last tonight. Being at such a high latitude, the sun doesn't exactly drop below the horizon, but slants gently down until it just so happens to be below the horizon. So, when it began its final leg of the course at around 8, the sun was barely 20 degrees above the horizon, and dimming from clouds and the longer ray path through the horizon. The temperature, incidentally, was also dropping - down to the single digits (fahrenheit). Somehow or other, despite there being less than a quarter of the sunlight it has available when it began this trip, and with the sun shining on the one panel that we haven't been able to bring online and leving the others in shadow, the robot was able to continue on. Probably the robot was drawing ever more heavily from the batteries to make up the shortfall. But the batteries began the trip with less than a half charge from the last day and a half of bench testing without recharge. So, at around 9, with now about 15% of the sunlight we had earlier today, the batteries were no longer able to keep the robot going, and we had to stop the test. We were only about a half mile from our destination. But, Jim and I are hardly discouraged - we managed to get through about 90% of the course and, had we just started a little earlier in the day, we would have succeeded handily. We have, in short, accomplished what we came here to do: to prove the robot can drive for long stretches on its own power and with its own guidance, free from human help or direction. But, it has made for a long day, as I said. And this has turned out by far to be the longest daily report yet. So, I shall close here. Well, one last thing, perhaps. While yesterday's Sunset was a bit of a let-down, the sky conditions right now (at 11:20 pm) indicate that tonight might be the spectacle we've been waiting for. --Alex Streeter |
|
 |
|
| Behold the power of solar. The robot is the black rectangle just right of center. Unfortunately, my camera can't produce a shutter speed fast enough to adequately capture the scene, and my skills in photoshop leave much to be desired. | |
|
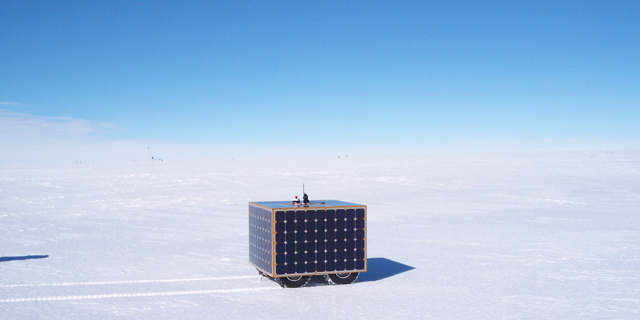
8/8/2005 Our final day of work here at Summit. Seeing how things went so well yesterday with the long course, we decided that we could best develop and demonstrate the long-distance reliability of the robot by simply having it run the course again. So, just after lunch, we sent the robot on its way, after first escorting it past a few Summit buildings and out to the Skiway. It took off just as before, under blue skies with scattered high-altitude clouds - plenty of solar power available. The four working panels of the robot were successfully supplying the necessary power as the robot made its way northeast. What then did Jim and I do, while the robot was making its way, mile after mile, along the course laid out for it? Well, today happened to be our day for handling various house duties, such as washing the dishes, vacuuming the Big House floor, cleaning the bathroom, etc. Not glamorous work, certainly, but necessary for the camp to function. Besides, what else would we do? Well, Jim began pouring over the data from Sunday's run: 10-second averages of about two dozen parameters of interest over the course of 6 hours. We also have 1 second data for all of those values, but it becomes impossible to really make sense of so many dots on a graph. Even in a pure binary format as a data file, that still works out to something like a megabyte of data per hour. Thankfully, we equipped our datalogger (a Campbell Scientific CR1000 - a very sweet unit) with a 1 GB flash card for storage. And so time wore away. Occassionally, one of us would grab a pair of binoculars and scan the horizon for a moving black rectangle - our robot making its way slowly but surely. To get a sense of how indistinct it could appear, observe the short video at the end of this post. After dinner, we expected the robot to have reached its final waypoint, having completed its course. In an effort to really test the endurance of the system, we had altered the code so that it would loop back to the beginning and perform the circuit again, and again, and again, until we told it to stop. So long as the sun continued to shine, we felt, the robot should be able to continue driving overnight. But, of course, from about 9 pm to 3 am, the amount of sunlight available at this time of the year is barely enough for solar power system to keep the electronics running (some 15 W), let alone power the motors to keep making headway (another 150-200 W), without pulling power from the batteries. So, we instructed the robot to stop for a while if the battery voltage dropped too low - ostensibly so that the batteries could recharge. However, with the lack of usable sunlight around midnight, this tactic was more to wait things out until the sun re-emerged. Around 8 pm, I scanned the Skiway, trying to find our intrepid robot. But, a fog has rolled in, and the glare from the sun made it difficult to even see the flags that mark the Skiway. So, I donned skis and set out to find the robot on foot, so to speak. After some searching around where I expected it to be, I did run into its tracks. However, the tracks were heading south, beyond the final waypoint, and not to the northeast, as it should have done if it were actually looping back to the beginning. Thankfully, I caught up with the robot after only about a half mile. It was, as instructed, sitting and trying to recharge its batteries, but the fog and late hour made this impossible for the robot. Unwilling to risk having it sit out for another six hours or so before resuming its erroneous track, Jim and I brought it back to camp with a snowmobile. Ok, so there were two slight shortfalls with this, our last test. The first is that the robot got confused when it was supposed to loop back to the beginning of its course. It had followed it course through the four waypoints quite well up to that point. So, there was some problem with the software that we haven't yet worked out. The second problem, which was out of our control, was the fact that the sun went away, leaving the robot to slowly but surely drain its batteries. It probably had enough energy stored in them to hang out for a few hours until there was more sun available, but Jim and I felt it best to bring it home. After all, we need to pack it away tomorrow. In tomorrow's post, since it will be a very slow day as far as the science is concerned, I'll try to summarize what we have accomplished these last two weeks (really, two years), what's the big deal about it, anyway?. --Alex Streeter |
|
 |
 |
| A brief video to give you a sense of just how far out the robot would be during these trips. Zoom in, zoom out. | Multiple rainbows caused by the evening sun, a blanket of fog over the snow surface, and a polarizing filter on my camera. [Full Size] |
|
8/9/2005 Here we are, last full day at Summit. If all goes according to plan, the LC-130 flight tomorrow will take us, and the robot, back to Kangerlussuaq. It has been a marvelously successful trip. In the two weeks here, we've managed to take a conglomeration of mostly-working subsystems and created a complete system from them. In the last few days, we have demonstrated that the robot can: * Navigate over long distances autonomously, following a GPS course given to it. * Drive over rugged terrain and soft snow, in excess of what we can expect in Antarctica. * Operate on solar power, a significant portion of which comes from reflection off the snow, and drive from this power so long as the sun lasts. * Match the power extracted from the different solar panels to the instantaneous demand. * Tow a sled weighing more than twice its own weight. The data Jim and I have collected during our time here will take quite some time to analyze. Of particular interest to us are the correlations between mobility, the power required to move, and our ability to supply that power from solar power. Keep your eyes open for upcoming publications in the papers section. That data and the the operational experience that we've gathered here will lead to a number of design improvements. Redesigns of both the hardware and software will result in a more robust system, with improved performance, which could be used as a platform for any number of studies of over-snow mobility, autonomous navigation, and photovoltaic control. It can also, of course, be used for its original purpose - as a mobile platform for conducting science in the extreme environments of the Arctic and Antarctic. Not bad for a couple of engineers tinkering over the last two years. Thank you all, and especially to the Summit Camp Staff! updates will continue until we get back stateside --Alex Streeter |
|
 |
|
| More multi-rainbow action, again caused by the fog in the air (which is weird enough in itself, since it was about -15C at the time of this picture) this time it's around the sun, and visible because an outcropping of the big house is masking the sun itself. | |
|
8/10/2005 So, the last day. Not much to tell, really. Upon waking up, Jim and I began to pack our personal gear (the robot having been packed and palletized the day before). We then had to break down our tents, and lent a hand in tent-striking to some folks that were also leaving that day. This was not actually as easy as it might sound - having been up for the last 3-4 months, the bottom edge of the tents and their flies had become encased in ice to the snow around, and the bamboo stakes had to be wrested from the packed snow as well. So, the tents literally had to be dug out, and th ice pulverized with a mallet or hammer, before one could even begin to start disassembling them. Kanger looked largely the same since we had arrived some 2-1/2 weeks ago. It was a bit warmer, before, but the sun was shining brightly, and all the hills about bathed in a warm glow of the low sun. After finding our rooms and enjoying our first shower since leaving the states, and a well-earned nap, we had dinner over at the airport (the only cafeteria-like place in the whole town). Afterwards, unable to resist the pull of the hills about me, and with nothing better to do, I decided to go for a hike. Since local sunset doesn't occur until about 11, I had plenty of time ahead of me. I won't regail you with tales of the hike - I don't really have the knack for it. Instead, I'll let this final picture here give you a sense of what I was able to see. --Alex Streeter |
|
 |
|
| the view westward from the hills overlooking Kangerlussuaq. In the center is the fjord that extends for nearly hundred miles to the sea. The lake to the left is the town's water source, Lake Ferguson. | |
| [Main] | [Mission] | [Design] | [Science] | [Papers] | [Pictures] | [Team] |
|
Last Updated on 10/15/2005 by Streeter
Site © Thayer School of Engineering, Dartmouth College, Hanover, N.H. |